Joystick shield v1 a подключение. Делаем еще один джойстик (геймпад) на Arduino
Инструкция
Джойстик - удобное и лёгкое в использовании устройство для передачи информации. Видов джойстиков по количеству степеней свободы, принципу считывания показаний и используемым технологиям существует большое количество. Джойстики чаще всего используются для управления движением каких-либо механизмов, управляемых моделей, роботов. Аналоговый джойстик, который мы сегодня рассмотрим, представляет собой ручку, закреплённую на шаровом шарнире с двумя взаимно перпендикулярными осями. При наклоне ручки, ось вращает подвижный контакт потенциометра, благодаря чему изменяется напряжение на его выходе. Также аналоговый джойстик имеет тактовую кнопку, которая срабатывает при вертикальном надавливании на ручку.
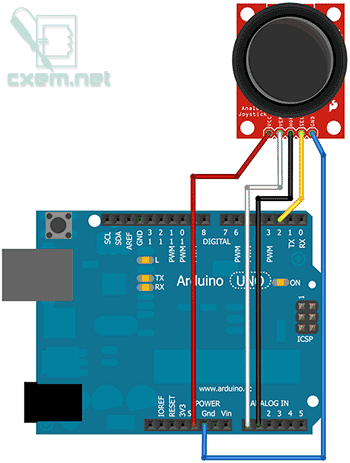
Подключим джойстик по приведённой схеме. Аналоговые выходы X и Y джойстика подключим к аналоговым входам A1 и A2 Arduino, выход кнопки SW - к цифровому входу 8. Питание джойстика осуществляется напряжением +5 В.

Для того чтобы наглядно увидеть, как работает джойстик, напишем такой скетч. Объявим пины, зададим им режимы работы. Обратите внимание, в процедуре setup() мы подали на вход switchPin высокий уровень. Этим мы включили встроенный подтягивающий резистор на этом порту. Если его не включить, то, когда кнопка джойстика не нажата, 8-ой порт Arduino будет висеть в воздухе и ловить наводки. Это повлечёт за собой нежелательные хаотичные ложные срабатывания.
В процедуре loop() мы постоянно опрашиваем состояние кнопки и отображаем его с помощью светодиода на выходе 13. Из-за того, что вход switchPin подтянут к питанию, светодиод постоянно горит, а при нажатии кнопки гаснет, а не наоборот.
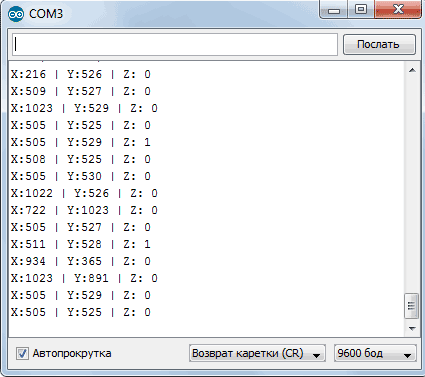
Далее мы считываем показания двух потенциометров джойстика - выхода осей X и Y. Arduino имеет 10-разрядные АЦП, поэтому значения, снимаемые с джойстика, лежат в диапазоне от 0 до 1023. В среднем положении джойстика, как видно на иллюстрации, снимаются значения в районе 500 - примерно середина диапазона.

Обычно джойстик используют для управления электродвигателями. Но почему бы не использовать его, например, для управления яркостью светодиода? Давайте подключим по приведённой схеме RGB светодиод (или три обычных светодиода) к цифровым портам 9, 10 и 11 Arduino, не забывая, конечно, о резисторах.

Будем менять яркость соответствующих цветов при изменении положения джойстика по осям, как показано на рисунке. Из-за того, что джойстик может быть не точно отцентрирован производителем и иметь середину шкалы не на отметке 512, а от 490 до 525, то светодиод может слегка светиться даже когда джойстик находится в нейтральном положении. Если вы хотите, чтобы он был полностью выключен, то внесите в программу соответствующие поправки.

Ориентируясь на приведённую диаграмму, напишем скетч управления Arduino яркостью RGB светодиода с помощью джойстика.
Сначала объявим соответствие пинов и две переменные - ledOn и prevSw - для работы с кнопкой. В процедуре setup() назначим пинам функции и подключим к пину кнопки подтягивающий резистор командой digitalWrite(swPin, HIGH) .
В цикле loop() определяем нажатие кнопки джойстика. При нажатии на кнопку переключаем режимы работы между режимом "фонарика" и режимом "цветомузыки".
В режиме freeMode() управляем яркостью светодиодов с помощью наклона джойстика в разные стороны: чем сильнее наклон по оси, тем ярче светит соответствующий цвет. Причём преобразование значений берёт на себя функция map(значение, отНижнего, отВерхнего, кНижнему, кВерхнему) . Функция map() переносит измеренные значения (отНижнего, отВерхнего) по осям джойстика в желаемый диапазон яркости (кНижнему, кВерхнему). Можно то же самое сделать обычными арифметическими действиями, но такая запись существенно короче.
В режиме discoMode() три цвета попеременно набирают яркость и гаснут. Чтобы можно было выйти из цикла при нажатии кнопки, каждую итерацию проверяем, не была ли нажата кнопка.
Джойстики – отличный источник входных данных для проекта по робототехнике. Создатели электроники всегда любили подобные вещи. Однако новичкам может показаться трудным понять концепцию во время кодирования и тому подобное. В статье ниже подробно описан механизм сборки ардуино джойстика и принцип его работы.
Многим роботизированным проектам нужен джойстик. Модуль джойстика на ардуино аналогичен тем, которые используются в игровых приставках. Это сделано путем установки двух потенциометров под углом 90 градусов. Потенциометры соединены с короткой палкой, центрированной пружинами.
Этот модуль производит на выходе около 2,5 В от X и Y, когда он находится в положение покоя. Перемещение джойстика приведет к изменению выходного сигнала от 0 В до 5 В в зависимости от его направления. Если вы подключите этот модуль к микроконтроллеру, вы можете ожидать, что значение будет около 512 в положении покоя.
Когда вы перемещаете джойстик, вы можете увидеть, что значения изменяются от 0 до 1023, в зависимости от его положения.
Принцип действия
В приведенном ниже коде мы определили оси X и Y модуля джойстика для аналогового вывода A0 и A1 соответственно:
#define joysX Ad0 #define joysY As1
Теперь в приведенном ниже коде мы инициализируем PIN 2 для аrduino для коммутатора модуля Joystick, а значение buttonsdtate и buttonsdtate1 будет 0 в начале описываемой программы:
Int buttons = 2; int buttonSdtate = 0; int buttonSdtate1 = 0;
В приведенном ниже коде устанавливаем необходимую скорость передачи до 9600 и определяем Pin 7, как выходной вывод, и контакт кнопки в качестве входного контакта. Первоначально контактная кнопка остается высокой, пока пользователь не нажмет на соответствующий переключатель.
Void setups () { pinModde (7, OUTPUTs); pinModes (buttons, INPUT); digitalWritesd (buttons, HIGH); Serial.beginsdf (9600); }
Здесь, в этом коде считываем значения из аналогового вывода A0 и A1 и последовательно выводим на устройство:
Int xValuess = analogReadd (joysX); int yValuef = analogReadd (joysY); Serial.prints(xValues); Serial.prinst ("\ f"); Serial.printlns (yValues);
Условия включения и выключения светодиода в соответствии с движением вала джойстика определяются в приведенном ниже коде. Здесь мы просто принимаем аналоговые значения напряжения на выводах A0 и A1 аrduino. Эти аналоговые значения будут меняться при перемещении джойстика, и светодиод будет светиться в соответствии с движением джойстика.
Это условие для перемещения вала джойстика в направлении оси Y:

If (xValues > = 0 && yValues <= 10){ digitalWrites (10, HIGHd); } else { digitalWrites (10, LOWd); }
If (xValues <= 10 && yValued> = 500) { digitalWrites (11, HIGHd); } else { digitalWrites (11, LOWsd); }
Это условие для перемещения вала джойстика в направлении оси X:
If (xValues> = 1020 && yValues> = 500) { digitalWrites (9, HIGHd); } else { digitalWrites (9, LOWf); }
Нижеописанный код – это условие для перемещения вала сконструированного прибора в направлении оси Y:
if (xValues> = 500 && yValues> = 1020) { digitalWrites (8, HIGHf); } else { digitalWrites (8, LOWf); }Когда мы перемещаем ось джойстика по диагонали, тогда одно положение приходит, когда аналоговое значение X и Y будет равно 1023 и 1023 соответственно, и светодиоды Pin 9, и Pin 8 будут светиться. Потому что он удовлетворяет условию светодиода. Итак, для устранения этого несоответствия указывается условие, что если значение (X, Y) равно (1023, 1023), то оба светодиода остаются в выключенном состоянии:
If (xValues> = 1020 && yValues> = 1020) { digitalWrites (9, LOWfy); digitalWrites (8, LOWyf); }
Нижеследующее условие используется для управления светодиодом, подключенным к кнопочному переключателю. Когда мы нажимаем джойстик, светодиод включается и фиксируется до тех пор, пока кнопка не опустится. Лучше использовать кнопочный переключатель.
If (buttonStatesy == LOWfy) { Serial.printlnsy («Switch = Highy»); digitalWritesy (7, HIGHf); } else { digitalWritesy (7, LOWfy);
Необходимые инструменты, материалы и программы
Для осуществления проекта “аrduino joystick” потребуются следующие материалы:
- модуль джойстика;
- светодиоды – 5 штук;
- резистор на 100 ом - 3 штуки;
- соединительные провода;
- макет.
Сборка устройства
Джойстики доступны в разных формах и размерах. Типичный модуль описываемого прибора показан на рисунке ниже. Этот модуль обычно обеспечивает аналоговые выходы, а выходные напряжения, обрабатываемые этим модулем, изменяются в соответствии с направлением, в котором его перемещает пользователь. Можно получить направление движения, интерпретируя эти изменения с помощью некоторого микроконтроллера.

Этот модуль джойстика имеет две оси. Они представляют собой ось X и ось Y. Каждая ось монтируется на потенциометр или горшок. Средние точки этих горшков определяются, как Rx и Ry. Таким образом, Rx и Ry являются переменными точками для этих горшков. Когда прибор находится в режиме ожидания, Rx и Ry действуют, как делитель напряжения.

Когда arduino джойстик перемещается вдоль горизонтальной оси, напряжение на контакте Rx изменяется. Аналогично, когда он перемещается вдоль вертикальной оси, напряжение на пикселе Ry изменяется. Таким образом, у нас есть четыре направления устройства на двух выходах ADC. Когда палочка перемещается, напряжение на каждом штыре должно быть высоким или низким, в зависимости от направления.
Настройка и отладка
После загрузки кода в аrduino и подключения компонентов в соответствии с электрической схемой, мы теперь управляем светодиодами с помощью джойстика. Можно включить четыре светодиода в каждом направлении в соответствии с движением вала устройства. Он имеет два потенциометра внутри, один – для перемещения по оси X, а другой – для перемещения по оси Y. Каждый потенциометр получает 5v от аrduino. Так как мы перемещаем устройство, значение напряжения изменится, и аналоговое значение в выводах A0 и A1 также станет иным.
Итак, из микроконтроллера аrduino мы считываем аналоговое значение для оси X и Y и включаем светодиоды в соответствии с движением оси устройства. Нажимаем переключатель на модуле и используем для управления одиночным светодиодом в цепи.
Код представлен ниже:
Тестирование
Для тестирования джойстика для ардуино понадобятся следующие компоненты:
- Микроконтроллер (любой, совместимый arduino).
- Модуль джойстика.
- 1 контактный разъем MM.
- Макет.
- USB-кабель.
Алгоритм тестирования:
- Подключите компоненты, используя MM-штырьковый разъем. + 5В подключается к источнику питания 5 В, вывод GND подключен к GND, контакты VRx и VRy подключены к аналоговому входу, контакты и штырьковый разъем подключены к цифровому выводу ввода/вывода.
- Номер контакта будет основан по фактическому программному коду.
- После аппаратного соединения вставьте образец эскиза в среду разработки аrduino.
- Используя USB-кабель, подключите порты от микроконтроллера к компьютеру.
- Загрузите программу.
- Смотрите результаты на последовательном мониторе.
Для плат Arduino существуют модули аналоговых джойстиков. Как правило, имеющие ось X, Y и кнопку - ось Z. Джойстик позволяет более плавно и точно отслеживать степень отклонения от нулевой точки. А помимо удобства по сравнению с кнопками, это позволяет реализовывать более совершенные интерфейсы. К примеру, при изменении какого-либо значения в меню, можно написать программу таким образом, что чем сильнее отклонена ось джойстика, тем быстрее изменяется значение переменной. Например, нам необходимо изменить значение от 0 до 2000 с шагом в 1. Представьте, сколько раз вам потребовалось бы нажимать кнопку или писать специальный алгоритм, скажем при длительности нажатия больше 3 сек прибавлять изменять шаг на 10 или 100. А при использовании джойстика это можно реализовать намного проще.
Средняя цена на подобные модули колеблется в районе 1-2$ за модуль (с бесплатной доставкой в Россию). Поиск модулей в магазине AliExpress
Сами модули выглядят примерно так:
Не пугайтесь количеством выводов, это сделано для универсальности и удобства подключения. Контакты Vcc и GND между всеми тремя группами контактов соединены. Т.о. для подключения нужно 5 проводов: ось X, ось Y, кнопка Z, питание V cc и общий GND. Джойстики пассивные модули и не потребляют какую-либо энергию от платы Arduino. Питание V cc необходимо только для подтягивающих резисторов. Бывают модули без подтягивающих резисторов, в таком случае, необходимо вывод подключения кнопки подтянуть к +V cc через резистор 1-10 кОм.
Схема подключения к Arduino:
В программе, работать с джойстиком также очень просто:
#define axis_X 0 // Ось Х подключена к Analog 0 #define axis_Y 1 // Ось Y подключена к Analog 1 #define axis_Z 2 // Ось Z (кнопка джойстика) подключена к Digital 2 int value_X, value_Y, value_Z = 0; // Переменные для хранения значений осей void setup() { pinMode(axis_Z, INPUT); // Задаем как вход Serial.begin(9600); } void loop() { value_X = analogRead(axis_X); // Считываем аналоговое значение оси Х Serial.print("X:"); Serial.print(value_X, DEC); // Выводим значение в Serial Monitor value_Y = analogRead(axis_Y); // Считываем аналоговое значение оси Y Serial.print(" | Y:"); Serial.print(value_Y, DEC); // Выводим значение в Serial Monitor value_Z = digitalRead(axis_Z); // Считываем цифровое значение оси Z (кнопка) value_Z = value_Z ^ 1; // Инвертируем значение Serial.print(" | Z: "); Serial.println(value_Z, DEC); // Выводим значение в Serial Monitor delay(250); // Задержка 250 мс }
Как видно выше, в начале мы определяем входные пины для осей (define), а потом в главном цикле считываем значения с пинов и выводим их в Serial Monitor. И видим следующую картину:
Как видите все довольно просто. И напоследок напишем небольшую программу, целью которой будет изменять значение переменной, в зависимости от отклонения джойстика по оси Y от нулевой точки. А при нажатии на кнопку джойстика, переменная будет обнуляться.
#define axis_Y 1 // Ось Y подключена к Analog 1 #define axis_Z 2 // Ось Z (кнопка джойстика) подключена к Digital 2 int value, value_Y, value_Z = 0; // Переменные для хранения значений осей void setup() { pinMode(axis_Z, INPUT); // Задаем как вход Serial.begin(9600); } void loop() { value_Y = analogRead(axis_Y); // Считываем аналоговое значение оси Y if(value_Y >= 0 && value_Y < 100) value = value - 10; if(value_Y > 100 && value_Y < 300) value = value - 5; if(value_Y > 300 && value_Y < 520) value = value - 1; if(value_Y > 535 && value_Y < 700) value = value + 1; if(value_Y > 700 && value_Y < 900) value = value + 5; if(value_Y > 900) value = value + 10; value_Z = digitalRead(axis_Z); // Считываем цифровое значение оси Z (кнопка) if(value_Z == 0) value = 0; // Сброс значения Serial.println(value, DEC); // Выводим значение в Serial Monitor delay(500); // Задержка }
Шла обычная пятница, ничто не предвещало беды…
Но червь «нужно что-то сделать» уже начал свою работу. После прочтения статьи я вспомнил, что у меня в барахле лет 15, если не больше, валяется сеговский геймпад. Забрал я его с твердым намерением сделать геймпад на процессоре AVR (про ардуино я тогда и не слышал, но пару небольших проектов на AVR сделал).
Еще больше утвердила мое намерение статья про MSX , и в пятницу я решил - делаю!
Из закромов был вытащен на белый свет сеговский геймпад в разобранном состоянии. К моему изумлению он был в полном комплекте (ну, если не считать порезанные дорожки и отсутствующий оригинальный контроллер), не хватало только 2-х болтиков.
В качестве контроллера я решил использовать Beetle , так как он был заказан мной когда-то, но пока не испробован, да и не очень понравился «малым количеством портов».

И тут меня ждало разочарование - портов 6, кнопок 10. Горю моему не было предела, но мозг таки нашел решение, для начала я решил попробовать собрать прототип из 2-х кнопок, так как я решил использовать фокус с диодом, чтобы опрашивать 10 кнопок с помощью 6 выводов. Практически окрыленный, я засел за проверку… И тут случилась следующая неприятность - кнопок на джойстике больше, чем 10! В общем это был тот момент, когда нужно было смотреть в документацию, хотя идей было много - например припаять (ага, моим паяльником, который накрывает почти все ножки с одной стороны микросхемы), или поискать просветления в интернете.
Документация же четко сказала, что портов у Beetle на самом деле не 6, а 10, что сделало дальнейший процесс скучным (так я думал). (Использование 8 выводов дает возможность опрашивать 2 * 6 = 12 кнопок, что мне и было нужно)
Схема подключения - матрица 6 х 2, потому как оригинальная плата была разведена удобным мне образом. (Кстати в процессе предыдущей переделки дорожки были порезаны, чтобы подключить клавиатурный контроллер, пришлось восстанавливать, вышло страшненько)
Схема получившегося геймпада:

Быстро накидав пример я убедился что он не работает… Не понял?! Пример то простейший. Подумав, сообразил, что цифровому пину не хватает того сопротивления, что дают резиновые токопроводящие кнопки, немного изменил схему, теперь читается аналоговый сигнал и сравнивается с половиной максимума. Перепаиваю контакты, переписываю программу и… ничего не работает, совсем. Контроллер не определяется, все пропало. Код проверен, и перепроверен, все должно работать! А контроллер не видится ни в какую. Мотивация падает, делаем перерыв.
Через некоторое время безуспешно поигравшись с Beetle, ну все, убил контроллер своим паяльником, с сожалением достаю из закромов Arduino Micro, прошиваю прошивку и снова тишина! Становится понятно, что-то не так с кодом, в конце концов нахожу банальную причину - бесконечный цикл в loop(), исправляю, но зашить то не могу! Оказывается проблема, когда контроллер не видится решается нажатием на резет во время прошивания (или замыканием пинов в моем случае)
В итоге получился сеговский геймпад, проверен, работает, я счастлив: поиграл в Metal Gear, Felix The Cat, Super Mario.



P. S. «Трюк со светодиодом». Конечно не обязательно использовать светодиод, обычный диод лучше подходит, суть простая, вместо двух выводов использовать один, соединенный с разными кнопками через 2 диода:










